SubjuGator 9 AUV
May 2025 - present - Machine Intelligence Lab
Another main project I have been involved with through the Machine Intelligence Lab is SubjuGator 9 (fig. 1), the ninth generation of my lab’s autonomous underwater vehicle (AUV). SubjuGator 9 is developed for the RoboSub international robotics competition, having its first deployment in summer 2025. I was the team lead for the competition and the preparatory effort leading up to it. At the competition, our lab placed the highest we have in over five years and successfully completed elements of the challenge that our lab hasn’t been able to in almost a decade, such as navigating to an underwater pinger using a hydrophone array.
I contributed to both the mechanical and software design of SubjuGator 9. Mechanically, I worked on creating mounts and enclosures for our camera system and our hardware kill system to safely disable the robot.
The camera enclosures (fig. 2) were an interesting challenge because the waterproof enclosures we had for the camera were only slightly larger that the camera itself, and a USB adapter and cable needed to also fit in the tube. To solve this problem, I created a 3D printed part that directed the cable along the side of the camera, while also providing a mounting point for the USB adapter. All of this had to interface with a penetrator to connect the internal cables to the rest of the submarine, so it was extremely space constrained. After a few iterations and test prints though, I was able to fit everything and assemble the tube.
My other main mechanical contribution to SubjuGator 9 was its hardware kill system. As a requirement from RoboSub, the vehicle must be able to be disabled by a diver by interacting with the submarine. Previous versions of this system for our vehicles had been difficult to use or included components that easily broke. To solve this problem, I created a simple 3D printed assembly (Fig. 3) that houses a “kill wand” that can be pulled to deactivate the submarine. At the end of the kill wand there is a magnet which interacts with a hall effect sensor inside the main hull of the submarine. When the wand is pulled, this is registered by the hall effect sensor, which then turns off relays that send power to the thrusters, disabling the submarine. Another issue with previous versions of the kill system that included a kill wand were that the wand was often dropped after being pulled, often causing a swimmer to have to swim into a deep pool. To solve this issue, I made it so the wand cannot be removed, but still pulled up. There is a bolt going through the bottom section of the kill wand that stops the wand from being completely removed, while still allowing enough travel (about 2”) to make it obvious if the wand has been pulled.

Fig.1 SubjuGator 9

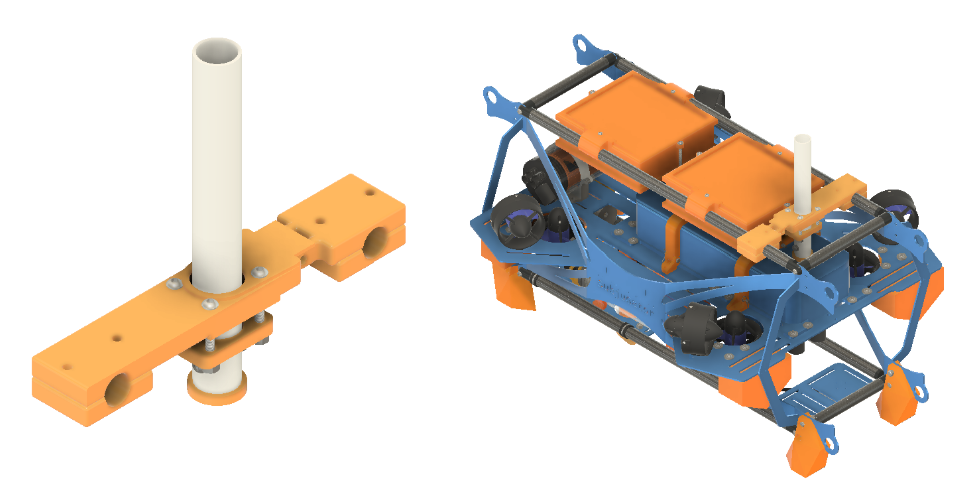
Fig.2. Camera Tube
Fig.3 Kill system assembly (left) and where it mounts to the submarine (right)