NaviGator AMS
January 2025 - present - Machine Intelligence Lab
NaviGator Autonomous Maritime System (AMS) is one of the primary projects I have contributed to throughout my time at the Machine Intelligence Lab. It is designed to compete in the international RobotX maritime challenge that occurs biannually at venues around the world. The objective of the challenge is to complete a sequence of tasks autonomously, including navigating through and around objects, identifying objects using vision, firing projectiles into a target, detecting underwater pingers, and launching a drone.
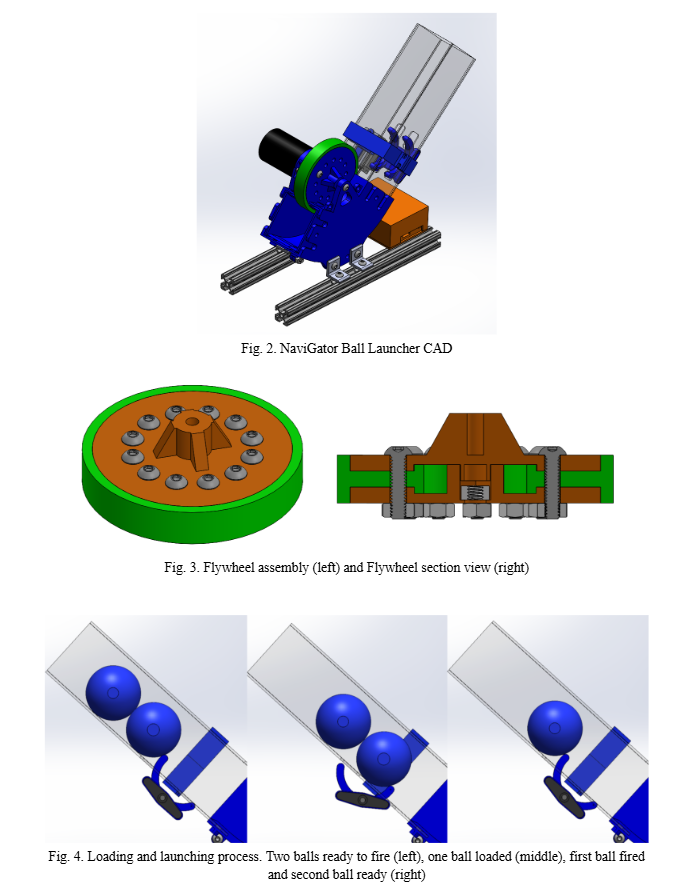
The first iteration of NaviGator (fig. 1) during my time at the lab competed at RobotX 2024 in Sarasota, FL. My primary contribution to the robot was its racquetball launcher, used to fire through floating targets at a range of ~10-15ft. The racquetball launcher (fig. 2) was designed in SolidWorks. The previous version of the launcher used a pneumatic firing system, but this proved to be too bulky and need to much maintenance to be practical. To rectify this issue, I replaced it with a flywheel based system.
The ball launcher was designed to be easy to maintain and repair should something break while away at the week long competition. The main body of the launcher was 3D printed so spares could be made easily, and the tube that held spare shots was simply rectangular pieces of polycarbonate sheet so it could easily be expanded. The flywheel was powered by a 2000 RPM motor that spun a custom flywheel (fig. 3). The outer ring of the flywheel was 3D printed out of TPU filament to take advantage of its friction and flexible properties, while also allowing the easy creation of multiple spares. The TPU wheel slotted between two 3D printed disks to secure it. Bolts were added around the outside of the flywheel to increase the inertia, decreasing the amount of time needed between successive shots.
To control the feeding of racquetballs into the flywheel, I created a mechanism to allow only one racquetball to be fed at a time (fig. 4). A simple 3D printed “cradle” in a U shape that is actuated by a servo stops the balls from rolling into the flywheel. The dimensions of the cradle are such that when it rotates to load the first racquetball, it stops the second ball from following behind it. This simple mechanism worked effectively to allow only one ball to fire at a time, giving the flywheel time to return to speed after each shot to ensure consistent trajectories.
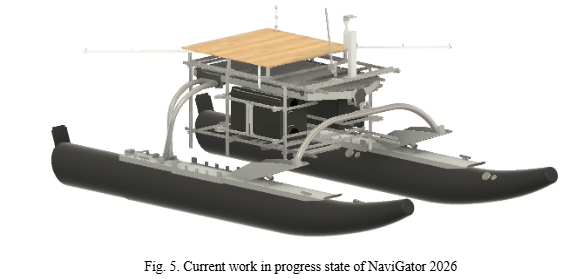
After the 2024 competition, I worked with a group of my labmates to advocate for a complete overhaul of the almost decade old robot.. We convinced our lab director to support the overhaul of the robot, which I am currently leading with a goal of deploying the robot by the end of this semester. In addition to managing the mechanical projects of all junior lab members contributing to the project, including sensor and actuator mounts, waterproofing, and integrating our drone with the robot, I am designing and building the main frame for the robot that will mount all electronic and computer systems. The current work-in-progress state of the robot is shown fig 5.
My main contribution to this project is the aluminum frame that houses all of the electronics and provides mounts for all of the sensors. Early in the design process I chose to construct the frame from 80-20 extrusion, allowing the frame to be modular and built using only off-the-shelf parts. Because the competition for RobotX changes every two years, this modularity will allow future generations of lab members to easily modify the frame to their needs, while providing a strong starting point.
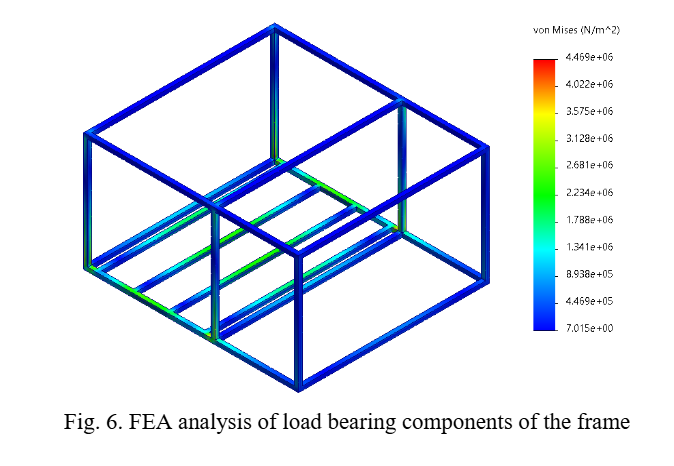
Also early in the design process, I conducted an FEA analysis (fig. 6) to verify that the frame would be able to withstand the expected loads caused from the computer systems mounted to the frame. In addition to ensuring the frame is structurally strong enough for its function, I have also worked diligently to ensure the frame is easy to interface electrical systems with, and also be easy to use during operations of the boat. To this end, I have created a mounting system for the pelican cases that house the electronics to make it easy to load and unload them from the boat. To load the boxes, they simply slide into a slot that guides their position. The boxes are then clamped to lock them in place, allowing completely toolless installation of the electronics boxes. There is redundant security for the boxes in doors that close over the front of them, ensuring the boxes cannot come free, even if the clamps were to fail.

Fig.1. NaviGator AMS at RobotX 2024 in Sarasota, FL